De uitdagingen voor een (autonome) dronevlucht kunnen ruwweg in vier blokken verdeeld worden: besturing, lokalisatie, traject planning of navigatie en connectiviteit. De besturing of flight controller (vluchtregelaar) is eigenlijk het centrale brein van de drone en bestaat uit een combinatie van hardware en firmware. De flight controller staat enerzijds in voor de stabilisatie van de drone tijdens de vlucht en anderzijds voor het ontvangen en vertalen van de gegeven commando’s naar specifieke acties voor de motoren via de elektronische snelheidsregelaars electronic speed controllers (ESCs).
Voor de stabilisatie van de drone tijdens de vlucht gebruikt de flight controller de informatie van haar inertial measurement unit (IMU). De IMU bestaat typisch uit drie gyroscopen en drie versnellingsmeters of accelerometers. Bijkomende sensoren kunnen de werking van de IMU verbeteren en dus de stabiliteit tijdens de vlucht verhogen, bijvoorbeeld door toevoegen van een magnetometer of kompas, een barometer, en een Global Navigation Satellite System (GNSS) of GPS sensor.
Bron: https://vrtracker.xyz/handling-imu-drift/
- Een gyroscoop meet hoeksnelheden, m.a.w. de “ligging” van de drone in de lucht (yaw, pitch, roll). Een gyroscoop is gevoelig aan drift, d.w.z. afwijkingen na verloop van tijd, en moet gekalibreerd of getrimd worden voor elke vlucht. Dat betekent dat deze moet afgesteld worden om te zorgen dat de juiste “ligging” van de drone vooraf gekend is.
- De accelerometer geeft de versnelling of vertraging van de dronebeweging aan. Ook voor deze sensoren is kalibratie nodig.
- Het kompas of magnetometer geeft een richting weer op basis van het aardmagnetisch veld. Een kalibratie is nodig voor elke nieuwe locatie op Aarde. Indien er elektriciteit of ijzer in de buurt is, zal deze sensor een afwijking geven omdat deze velden sterker zijn dan het aardmagnetisch veld.
- De barometer geeft informatie over de hoogte. Indien de drone snel vliegt of er veel wind is, kan de informatie minder betrouwbaar zijn, bovendien is een barometer ook gevoelig aan weersveranderingen.
- Een GPS sensor geeft informatie over de positie van de drone, maar is enkel betrouwbaar in een open en outdoor omgeving
De sensoren van de IMU laten toe om te bepalen hoe de drone zich doorheen de lucht beweegt en geeft deze informatie door aan de flight controller. De flight controller past de instellingen van motoren aan om de drone te stabiliseren, om de snelheid van elke motor te bepalen en ook van de drone in het algemeen, om de drone ter plaatse te laten hoveren, om een traject te bepalen, ….
De flight controller heeft ook een chip pf processing unit die geprogrammeerd kan worden om autonomer te handelen, maar voor een verhoogde autonomie is bijkomende informatie een noodzaak. In eerste fase is vooral belangrijk om de exacte positie van de drone te kennen. Dit noemt men lokalisatie of positioning. In een open en outdoor omgeving kan een GPS sensor volstaan. In een indoor omgeving wordt vaak ultra-breed band of ultra-wide band (UWB) gebruikt, al dan niet in combinatie met andere sensoren.
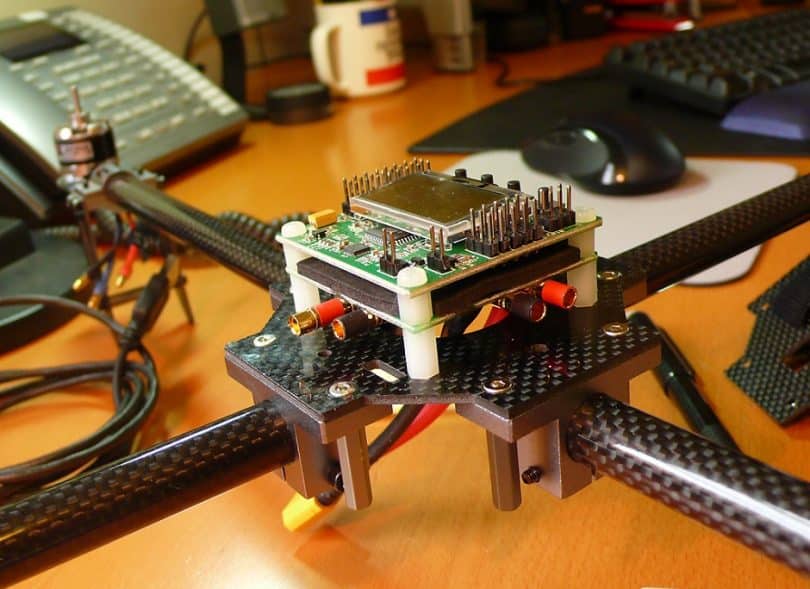
Bron: https://oscarliang.com/flight-controller-explained/
Die combinatie van sensoren zorgt voor redundantie en is cruciaal om een veilig systeem te krijgen. Indien één van de sensoren onbetrouwbare informatie levert, kan het systeem terugvallen op de informatie van de andere sensoren, ook al is de accuraatheid daarvan misschien minder goed. Indien er maar één sensor gebruikt zou worden die onbetrouwbare of zelfs verkeerde informatie doorgeeft, kan dit leiden tot een ongewenste actie van de flight controller en zelfs een crash van de drone.
In een tweede fase is het belangrijk dat de drone botsingen of gevaarlijke situaties kan vermijden. Hiervoor worden o.a. time-of-flight (TOF) sensors en range finders gebruikt. In een derde fase van verhoogde autonomie is het relevant dat een drone ook zijn omgeving kan percipiëren en op basis hiervan zelf beslissingen kan maken in het belang van de missie. Voorgaande sensoren kunnen hiervoor gebruikt worden in combinatie met allerhande (event) camera’s en computer visie. Op basis hiervan kunnen obstakels geïdentificeerd worden en kan een nieuw traject gepland worden of kunnen specifieke objecten of personen gedetecteerd worden en kan een specifieke taak uitgevoerd worden naargelang de missie van de drone.
Auteur
PETRA VAN MULDERS
Petra is drone cluster manager van EUKA en projectleider bij Flanders Make voor allerlei projecten waar drones aan bod komen. Ze heeft een achtergrond als deeltjesfysicus en werkte samen met het CERN.
Contacteer EUKA/Flanders Make voor meer informatie
Updates en nieuwe artikels ontvangen in je mailbox? Schrijf je dan snel in voor onze nieuwsbrief!